
ROSを試してみたいと思い、下記のサイトを参考にインストール、動作確認をしました。
参考:
「ROSで始めるロボティクス(2) ー ROSのインストールとセットアップ」
http://bril-tech.blogspot.jp/2016/10/ros2-ros.html
「ROSトピックの理解」
http://wiki.ros.org/ja/ROS/Tutorials/UnderstandingTopics
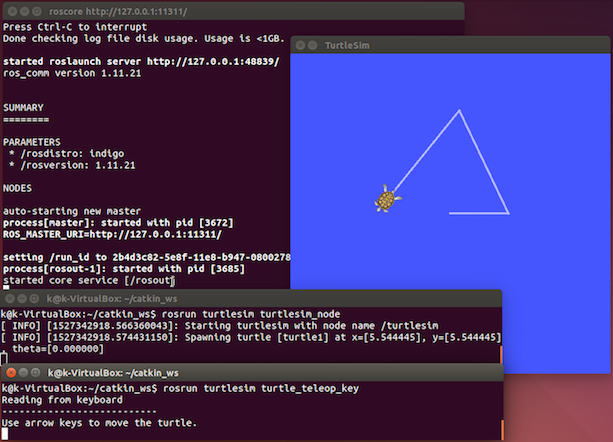
ROSは、独立したノードからできていて、ノード間で互いに通信してシステムを構成します。roscoreというノードが通信できるよう仲介するサービスをまず立ち上げる必要かがあります。
そういった構成のため、ターミナル多数立ち上げて操作することになります。
動作を確認したのは、キーボードからカーソルキーを使ってタートルを動かすデモです。
環境変数がきちんと設定されているので、指定したプログラムを検索して実行してくれるようです。
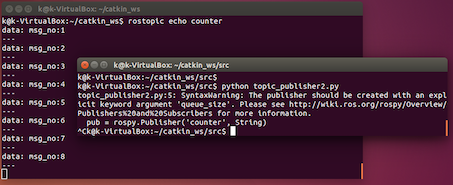
次は、オライリー「プログラミングROS」を参考にトピックのパブリッシュをPythonでしてみました。
Pub/Subとわれるもので、パブリッシュしたメッセージを、echoコマンドで受信してみました。
|
1 2 3 4 5 6 7 8 9 10 11 12 13 |
import rospy from std_msgs.msg import String rospy.init_node('topic_publisher') pub = rospy.Publisher('counter', String) rate = rospy.Rate(1) cnt = 0 while not rospy.is_shutdown(): msg = "msg_no:" + str(cnt) pub.publish(msg) cnt += 1 rate.sleep() |
本当はロボットアームとかを動作させてみたかったのですが、VirtualBoxでは重すぎて使いものにならず、このような簡単なものになりました。
環境が整えばぜひこれらも試してみたいです。(やはりGPU付きのPCが必要かな)