
Posted on 2018/03/18, 9:39 AM By admin22
ロボットアームなどで、先端に目的の動きをさせるためには、関節をどのくらい動かしたらいいかを逆計算したいときがあります。(インバースキネマティクスというらしいです。)
その計算をExcelのソルバを使ってやってみました。
アームの長さは1として、関節二つの腕を、0.25,0.5,0.75,1.0と先端を上昇させる動きをイメージしています。
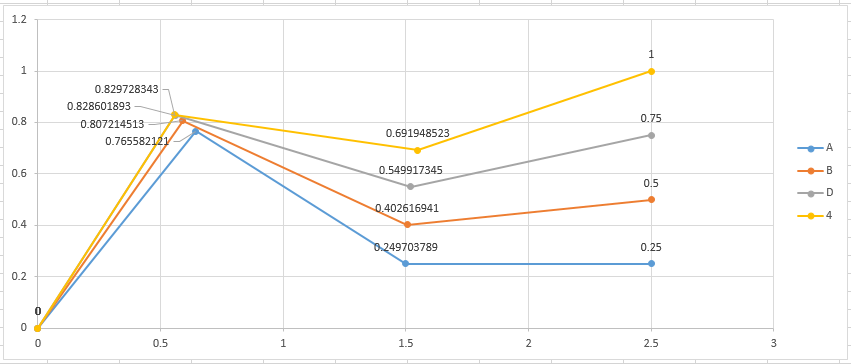

4ケースだけだったので、手作業でソルバを一つずつ設定、計算して使っています。(Dのケース)

セルの計算(Aのケース)
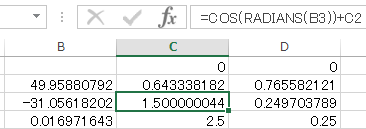
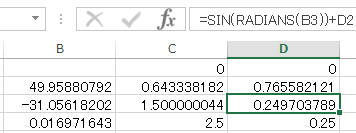
左の列は、支点、第一関節、第二関節の水平に対する角度。
ソルバの条件を変えると違う動きをします。
グラフをアームに見立てるのも面白いと思いました。
Categories: 未分類 タグ: Excel